1. MONTAJE
Móvil para Mini-robot
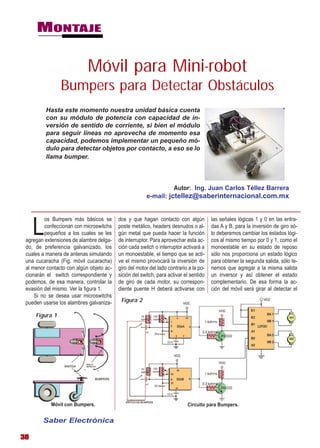
Bumpers para Detectar Obstáculos
Hasta este momento nuestra unidad básica cuenta
con su módulo de potencia con capacidad de in-
versión de sentido de corriente, si bien el módulo
para seguir líneas no aprovecha de momento esa
capacidad, podemos implementar un pequeño mó-
dulo para detectar objetos por contacto, a eso se lo
llama bumper.
Autor: Ing. Juan Carlos Téllez Barrera
e-mail: jctellez@saberinternacional.com.mx
os Bumpers más básicos se dos y que hagan contacto con algún las señales lógicas 1 y 0 en las entra-
L confeccionan con microswitchs
pequeños a los cuales se les
agregan extensiones de alambre delga-
poste metálico, headers desnudos o al-
gún metal que pueda hacer la función
de interruptor. Para aprovechar esta ac-
das A y B, para la inversión de giro só-
lo deberemos cambiar los estados lógi-
cos al mismo tiempo por 0 y 1, como el
do, de preferencia galvanizado, los ción cada switch o interruptor activará a monoestable en su estado de reposo
cuales a manera de antenas simulando un monoestable, el tiempo que se acti- sólo nos proporciona un estado lógico
una cucaracha (Fig. móvil cucaracha) ve el mismo provocará la inversión de para obtener la segunda salida, sólo te-
al menor contacto con algún objeto ac- giro del motor del lado contrario a la po- nemos que agregar a la misma salida
cionarán el switch correspondiente y sición del switch, para activar el sentido un inversor y así obtener el estado
podemos, de esa manera, controlar la de giro de cada motor, su correspon- complementario. De esa forma la ac-
evasión del mismo. Ver la figura 1. diente puente H deberá activarse con ción del móvil será girar al detectar el
Si no se desea usar microswitchs
pueden usarse los alambres galvaniza- Figura 2
Figura 1
Móvil con Bumpers. Circuito para Bumpers.
Saber Electrónica
38
2. Montaje
obstáculo, dicho giro durará sólo el la única limitante de que no estén muy co que detecte ese “loop” en el que es-
tiempo que nosotros ajustemos en el próximos entre sí ya que podemos lle- tá atrapado, pero podría ser algo com-
monoestable y así poder darle mayor o gar al caso de que quede atrapado en- plejo. Lo interesante de esta etapa es
menor “sensibilidad”. tre dos objetos o en alguna esquina, analizar su funcionamiento, detectar las
Como podrán darse cuenta nuestro pero la solución a esto sólo podría ser limitantes de operación y con esta prác-
mini-robot podrá sortear obstáculos con subsanada adicionando un circuito lógi- tica determinar un método lógico, un al-
goritmo o una solución para optimizarlo
y que pueda ser implementada con cir-
cuitería o algún microcontrolador en
etapas posteriores, recuerden, anali-
zando podemos proponer soluciones,
lo que estimulará nuestro razonamiento
lógico y le dará interés a nuestra crea-
ción.
La implementación de los bumpers
es la más tosca para detectar obstácu-
los, pero muy didáctica, nuestro “Sen-
sor” fue un simple switch, pero si se
dan cuenta, el switch sólo alterna entre
dos estados lógicos, 1 y 0, alto y bajo,
cerrado o abierto, por lo tanto si imple-
mentamos con algún otro sensor un
circuito que nos entregue el mismo re-
sultado podemos refinar nuestro diseño
lo cual es la siguiente etapa, de acuer-
do al sensor usado lo dotaremos de un
“sentido extra” mejorando su desempe-
ño, recuerden, debemos probar con to-
das aquellas opciones que tengamos a
la mano para poder mejorarlas sustan-
cialmente en la última etapa en la cual
podremos combinar varios sensores en
una única unidad autónoma, y com-
prender a profundidad la gama de apli-
caciones de cada sensor de una deter-
minada variable física y darle aplicación
en proyectos más avanzados sin ser
necesariamente parte de un robot. ✪
Lista de materiales:
C.I. – 556 Doble temporizador.
Q1,Q2 – 2N2222
C1 y C2 – 10nF
C3 y C4 – 22µF
C5 y C6 – 1nF
R1 y R2 – 10K ohms
R3 y R4 – 2.2K ohms
R5 y R6 – 1K ohms
VR1 y VR2 – 100 Kohms
Varios:
Switchs pequeños, alambre
galvanizado
Saber Electrónica
39