1. 20391: Visió per Computador
Apunts de l’assignatura
Classe 5
Visió Binocular
Jordi Vitrià 20391: Visió per Computador 1
2. 20391: Visió per Computador
Apunts de l’assignatura
Si adquirim dues imatges simultànies del món des
de dos punts de vista (lleugerament) diferent, llavors
les imatges són (lleugerament) diferents!
Quina avantatge pot tenir el fet d’adquirir simultàniament
dues imatges lleugerament diferents?
Jordi Vitrià 20391: Visió per Computador 2
3. 20391: Visió per Computador
Apunts de l’assignatura
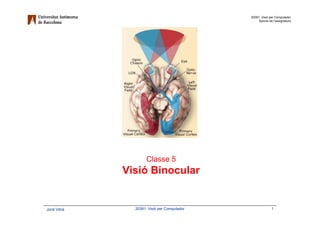
El sistema visual humà té un camp visual horitzontal de 200º
i vertical de 135º.
Figure shows a plot of the field of view using the head as the coordinate system. The two shaded
regions represent the view from the left eye and the right eye respectively. The darker shaded region
represents the region of binocular overlap. The oval in the center represents the region where the
ocular muscles can point the high resolution fovea region of the eyes. The region where high
resolution vision can occur simply by pointing the eyes relative to the head covers a wide field of view.
In terms of resolution expressed as pixels, assuming the nominal resolution of the fovea region as 1
arc minute, the region of high resolution vision is equivalent to 24 million pixels.
Jordi Vitrià 20391: Visió per Computador 3
4. 20391: Visió per Computador
Apunts de l’assignatura
El sistema visual humà segons R.Descartes,
Tractatus de Homine, 1664.
Com pot ser que només percebem una imatge?
Jordi Vitrià 20391: Visió per Computador 4
5. 20391: Visió per Computador
Apunts de l’assignatura
El sistema visual humà.
Com pot ser que només percebem una imatge?
Jordi Vitrià 20391: Visió per Computador 5
6. 20391: Visió per Computador
Apunts de l’assignatura
El sistema visual humà.
Com pot ser que només percebem una imatge?
Jordi Vitrià 20391: Visió per Computador 6
7. 20391: Visió per Computador
Apunts de l’assignatura
Jordi Vitrià 20391: Visió per Computador 7
8. 20391: Visió per Computador
Apunts de l’assignatura
Jordi Vitrià 20391: Visió per Computador 8
9. 20391: Visió per Computador
Apunts de l’assignatura
Jordi Vitrià 20391: Visió per Computador 9
10. 20391: Visió per Computador
Apunts de l’assignatura
Visió Binocular
La determinació de la posició 3D d’un punt de
l’escena a partir de la seva projecció en dues
imatges presenta dues problemàtiques:
• El problema de la reconstrucció, o a partir de
les projeccions determinar la seva situació a
l’escena.
• Paràmetres de les càmares.
• Calibració.
• El problema de la correspondència, o
determinar automàticament les parelles de
projeccions de cada punt visible.
• Semblança i no identitat.
• Oclusions.
Jordi Vitrià 20391: Visió per Computador 10
11. 20391: Visió per Computador
Apunts de l’assignatura
Visió Binocular: Variables
(model simple – vergència simètrica).
P
(x,y,z) ó (xl,yl,zl) ó (xr,yr,zr)
α α
Pl Pl
(x’l,y’l) (x’r,y’r)
Yl f f Yr
Zl Zr
Xl (X,Y,Z)
Ol d Xr Or
Z
Jordi Vitrià 20391: Visió per Computador 11
12. 20391: Visió per Computador
Apunts de l’assignatura
Visió Binocular: Variables (model simple –
vergència simètrica).
d d
x1 cos(α ) 0 sin(α ) x + − f sin(α ) x2 cos(α ) 0 − sin(α ) x − + f sin(α )
2 2
y1 = 0 1 0 y y2 = 0 1 0 y
z − sin(α ) 0 cos(α ) z z sin(α ) 0 cos(α )
1 2 z
fxi
x =
'
( f − zi )
i
fyi
y =
'
( f − zi )
i
Jordi Vitrià 20391: Visió per Computador 12
13. 20391: Visió per Computador
Apunts de l’assignatura
Visió Binocular: Variables (model simple –
vergència simètrica).
Hi ha 10 equacions i 9 incògnites, lo qual restringeix el
conjunt de solucions: la línia epipolar.
L P R
pl pr
Or
Ol
el er
Epipols
Línies epipolars:
Projecció a r de la línia
Pla Epipolar: definit per Or , Ol i P que passa per P i pl
Jordi Vitrià 20391: Visió per Computador 13
14. 20391: Visió per Computador
Apunts de l’assignatura
Visió Binocular: Variables (model simple –
eixos òptics paral·lels).
P
Z
x’l x’r
f
Ol Or
d
Jordi Vitrià 20391: Visió per Computador 14
15. 20391: Visió per Computador
Apunts de l’assignatura
Visió Binocular: Variables (model simple –
eixos òptics paral·lels).
Com que α és zero, llavors la profunditat (f-z) és
fd d
f −z= ' Z≈ f
( xr − xl' ) dx
La profunditat és inversament proporcional a la
diferència en coordenades x, que s’anomena
disparitat.
Jordi Vitrià 20391: Visió per Computador 15
16. 20391: Visió per Computador
Apunts de l’assignatura
Vista Esquerra Vista Dreta
Disparitat
Jordi Vitrià 20391: Visió per Computador 16
17. 20391: Visió per Computador
Apunts de l’assignatura
La distància entre l’observador i un objecte
està directament (inversament proporcional)
relacionada amb la disparitat!
Jordi Vitrià 20391: Visió per Computador 17
18. 20391: Visió per Computador
Apunts de l’assignatura
Precisió en el càlcul de Z
• Precisió (Resolució) vs. Separació Ol
Dos punts de vista
Or
entre càmares (d)
– Error en z ∝ 1/d
Z1
– PROS de separar-les més,
• Millor estimació de la profunditat Z2
∂Z1
– CONTRES
• menor FOV (Field of View) comú
• Correspondència més difícil degut a
oclusions ∂Z2>∂Z1
• Precisió (Resolució) vs. Profunditat
– Disparitat (>0) ∝ 1/Profunditat d
Z= f
– Error Profunditat ∝ Profunditat2 dx
– Com més a prop del punt, més Z2
precisió. ∂Z = ∂ (dx)
fd
Jordi Vitrià 20391: Visió per Computador 18
19. 20391: Visió per Computador
Apunts de l’assignatura
Geometria i error
Estèreo amb Eixos Paral·lels. FOV
– Línia de Base curta
• Camp visual (FOV) comú gran.
• Errors de profunditat grans.
– Línia de Base llarga
• Camp visual (FOV) comú petit.
• Errors de profunditat petits.
• Oclusions!
Esquerra Dreta
Jordi Vitrià 20391: Visió per Computador 19
20. 20391: Visió per Computador
Apunts de l’assignatura
Geometria i error
FOV
Estèreo amb Eixos Paral·lels.
– Línia de Base curta
• Camp visual (FOV) comú gran.
• Errors de profunditat grans.
– Línia de Base llarga
• Camp visual (FOV) comú petit.
• Errors de profunditat petits.
• Oclusions!
Esquerrra Dreta
Jordi Vitrià 20391: Visió per Computador 20
21. 20391: Visió per Computador
Apunts de l’assignatura
Geometria i error
Estèreo amb càmares convergents.
• Els dos eixos òptics convergeixen al Punt de Fixació. Punt de Fixació
– Angle de convergència θ
– El FOV comú creix. FOV
• Propietats de la disparitat
– Usem l’angle en lloc de la distància.
– Disparitat zero al punt d fixació. θ
• I a l’horòpter!
– La disparitat augmenta en relació a
la distància al punt de fixació.
• >0 : més enllà de l’horòpter
• <0 : abans de l’horòpter
• Precisió vs. Profunditat
– Error ∝ Profunditat2
– Com més a prop el punt, millor
Esquerra Dreta
Jordi Vitrià 20391: Visió per Computador 21
22. 20391: Visió per Computador
Apunts de l’assignatura
Geometria i error
Estèreo amb càmares convergents. Punt de
• Els dos eixos òptics convergeixen al Punt de Fixació.
Fixació
– Angle de convergència θ
– El FOV comú creix.
• Propietats de la disparitat
Horòpter
– Usem l’angle en lloc de la distància.
– Disparitat zero al punt de fixació.
• I a l’horòpter!
– La disparitat augmenta en relació a
la distància al punt de fixació.
• >0 : més enllà de l’horòpter
• <0 : abans de l’horòpter
• Precisió vs. Profunditat αl αr
– Error ∝ Profunditat2
– Com més a prop el punt, millor αr = αl
α
dα = 0
Esquerra Dreta
Jordi Vitrià 20391: Visió per Computador 22
23. 20391: Visió per Computador
Apunts de l’assignatura
Geometria i error
Estèreo amb càmares convergents.
• Els dos eixos òptics convergeixen al Punt de Fixació. Punt de
– Angle de convergència θ Fixació
– El FOV comú creix.
• Propietats de la disparitat
– Usem l’angle en lloc de la distància.
– Disparitat zero al punt d fixació.
Horòpter
• I a l’horòpter!
– La disparitat augmenta en relació a
la distància al punt de fixació.
• >0 : més enllà de l’horòpter
• <0 : abans de l’horòpter
• Precisió vs. Profunditat
– Error ∝ Profunditat2 αl αr
– Com més a prop el punt, millor αr > αl
α
dα > 0
Esquerra Dreta
Jordi Vitrià 20391: Visió per Computador 23
24. 20391: Visió per Computador
Apunts de l’assignatura
Geometria i error
Estèreo amb càmares convergents.
• Els dos eixos òptics convergeixen al Punt de Fixació. Punt de
Fixació
– Angle de convergència θ
– El FOV comú creix.
• Propietats de la disparitat
– Usem l’angle en lloc de la distància. Horòpter
– Disparitat zero al punt d fixació.
• I a l’horòpter!
– La disparitat augmenta en relació a
la distància al punt de fixació. αr
• >0 : més enllà de l’horòpter
• <0 : abans de l’horòpter
• Precisió vs. Profunditat
αL
– Error ∝ Profunditat2
– Com més a prop el punt, millor αr < αl
α
dα < 0
Esquerra Dreta
Jordi Vitrià 20391: Visió per Computador 24
25. 20391: Visió per Computador
Apunts de l’assignatura
Geometria i error
Estèreo amb càmares convergents.
• Els dos eixos òptics convergeixen al Punt de Fixació. Punt de
– Angle de convergència θ Fixació
– El FOV comú creix.
• Propietats de la disparitat
– Usem l’angle en lloc de la distància.
– Disparitat zero al punt d fixació.
• I a l’horòpter!
– La disparitat augmenta en relació a
la distància al punt de fixació.
• >0 : més enllà de l’horòpter
• <0 : abans de l’horòpter
• Precisió vs. Profunditat
– Error ∝ Profunditat2 αl αr
– Com més a prop el punt, millor
∆(dα)
∆( α) ?
Esquerra Dreta
Jordi Vitrià 20391: Visió per Computador 25
26. 20391: Visió per Computador
Apunts de l’assignatura
Geometria i error
Estèreo amb càmares convergents.
• Els dos eixos òptics convergeixen al Punt de Fixació.
Punt de
– Angle de convergència θ Fixació
– El FOV comú creix.
• Propietats de la disparitat
– Usem l’angle en lloc de la distància.
– Disparitat zero al punt d fixació.
Horòpter
• I a l’horòpter!
– La disparitat augmenta en relació a
la distància al punt de fixació.
• >0 : més enllà de l’horòpter
• <0 : abans de l’horòpter
• Precisió vs. Profunditat
– Error ∝ Profunditat2 αl αr
– Com més a prop el punt, millor
∆(dα)
∆( α) ?
Esq Dreta
Jordi Vitrià 20391: Visió per Computador 26
27. 20391: Visió per Computador
Apunts de l’assignatura
El problema de la recerca de la
correspondència.
Jordi Vitrià 20391: Visió per Computador 27
28. 20391: Visió per Computador
Apunts de l’assignatura
El problema de la recerca de la
correspondència.
A vegades funciona... I a vegades no...
Jordi Vitrià 20391: Visió per Computador 28
29. 20391: Visió per Computador
Apunts de l’assignatura
El problema de la recerca de la
correspondència.
Ocult per la imatge R Ocult per la imatge L
L R
Jordi Vitrià 20391: Visió per Computador 29
30. 20391: Visió per Computador
Apunts de l’assignatura
El problema de la recerca de la
correspondència.
?
=
f g
Jordi Vitrià 20391: Visió per Computador 30
31. 20391: Visió per Computador
Apunts de l’assignatura
El problema de la recerca de la
correspondència (dins de la línia epipolar!).
• Mètodes basats en l’àrea (finestres lliscants).
• Criteris de semblança.
• Algorisme robust.
• Mètodes basats en la correspondència de punts
característics (contorns, cantonades, etc).
• És més ràpid.
• És més robust.
• No és dens.
Jordi Vitrià 20391: Visió per Computador 31
32. 20391: Visió per Computador
Apunts de l’assignatura
El problema de la recerca de la
correspondència: Mètodes basats en la
correspondència de punts característics
Imatge Esquerra
Cantonada Línea
Estructura
Jordi Vitrià 20391: Visió per Computador 32
33. 20391: Visió per Computador
Apunts de l’assignatura
El problema de la recerca de la
correspondència: Mètodes basats en la
correspondència de punts característics
Imatge dreta
Cantonada Línia
Estructura
Jordi Vitrià 20391: Visió per Computador 33
34. 20391: Visió per Computador
Apunts de l’assignatura
El problema de la recerca de la
correspondència (dins de la línia epipolar).
Equacions
W W
c(dx, dy ) = ∑ ∑ψ ( I l ( xl + k , yl + l ), I r ( xl + dx + k , yl + dy + l ))
k = −W l = −W
Disparitat d = (d x, d y ) = arg max{c(dx, dy )}
d∈R
Cross-Correlation Ψ (u , v) = uv
Sum of Square Difference (SSD) Ψ (u, v) = −(u − v) 2
Sum of Absolute Difference(SAD)
(té avantatges computacionals)
Ψ (u, v) = − | u − v |
Jordi Vitrià 20391: Visió per Computador 34
35. 20391: Visió per Computador
Apunts de l’assignatura
El problema de la recerca de la
correspondència (dins de la línia epipolar).
La mida de la finestra és important!
Els mètodes no respondran igual!
Jordi Vitrià 20391: Visió per Computador 35
36. 20391: Visió per Computador
Apunts de l’assignatura
El problema de la recerca de la
correspondència (dins de la línia
epipolar).
Algorisme per comparar finestres.
Sigui una finestra quadrada de nxn pixels. Sigui min=9 i
max = 19.
1. n ← np
2. Calculem c(dx,dy) pels punts candidats.
3. Si c(dx,dy) té un únic mínim tal que c(dx,dy)<T1,
llavorts ja hem trobat el punt corresponent.
4. Si min{c(dx,dy) }>T2, llavors no hi ha
correspondència.
5. En els altres casos, si hem arribat a max, no hi ha punt
corresponent. Si n<max, llavors n ← n+2 i anem a (2).
Jordi Vitrià 20391: Visió per Computador 36
37. 20391: Visió per Computador
Apunts de l’assignatura
Jordi Vitrià 20391: Visió per Computador 37
38. 20391: Visió per Computador
Apunts de l’assignatura
Jordi Vitrià 20391: Visió per Computador 38
39. 20391: Visió per Computador
Apunts de l’assignatura
Jordi Vitrià 20391: Visió per Computador 39
40. 20391: Visió per Computador
Apunts de l’assignatura
Jordi Vitrià 20391: Visió per Computador 40
41. 20391: Visió per Computador
Apunts de l’assignatura
Algorisme de Malik&Jones per visió
binocular.
El Problema de la correspondència:
(a) Quines son les característiques a comparar?
(b) Com les comparem?
(c) Han de ser especials o compatibles amb d'altres
processos visuals (textura, moviment)?
Pixels → contorns → àrees → respostes de bancs de filtres.
Jordi Vitrià 20391: Visió per Computador 41
42. 20391: Visió per Computador
Apunts de l’assignatura
Algorisme de Malik&Jones per visió
binocular.
El conjunt de respostes d'un banc de ltres en un punt
caracteritza una regió de la imatge amb un conjunt
de valors al punt. (Aproximacio de Taylor: ...)
Jordi Vitrià 20391: Visió per Computador 42
43. 20391: Visió per Computador
Apunts de l’assignatura
Algorisme de Malik&Jones per visió
binocular.
Els filtres son wxw amb w = {3; 5; 7; 10; 14; 20; 28}
Es pot demostrar que amb aquest conjunt de filtres
podem reconstrïr una imatge força bé.
Jordi Vitrià 20391: Visió per Computador 43
44. 20391: Visió per Computador
Apunts de l’assignatura
Algorisme de Malik&Jones per visió
binocular.
Com comparem les respostes?
Jordi Vitrià 20391: Visió per Computador 44
45. 20391: Visió per Computador
Apunts de l’assignatura
Algorisme de Malik&Jones per visió
binocular.
Norma més robusta:
em = ∑ Ak ⊗ I l ( x, y ) − Ak ⊗ I r ( x + ∂x, y + ∂y )
k
Jordi Vitrià 20391: Visió per Computador 45