Fuzzy
•
0 gefällt mir•373 views

Este documento describe el diseño de sistemas avanzados de control usando técnicas de control difuso. Explica los conceptos básicos del control difuso, incluyendo el mecanismo de inferencia, reglas difusas y funciones de pertenencia. También presenta un ejemplo de control difuso para la conducción de un vehículo y discute las ventajas del control difuso sobre otros métodos para sistemas no lineales y procesos complejos.

Empfohlen
Weitere ähnliche Inhalte
Kürzlich hochgeladen
Kürzlich hochgeladen (20)
Empfohlen
Empfohlen (20)
Fuzzy
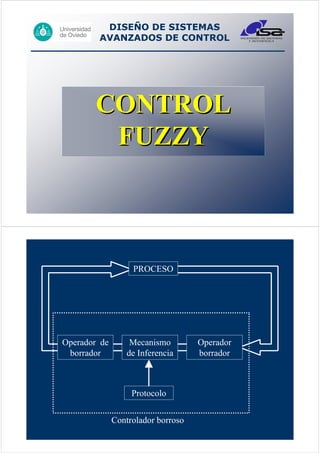
- 1. DISEÑO DE SISTEMAS AVANZADOS DE CONTROL CONTROL FUZZY PROCESO Operador de Mecanismo Operador borrador de Inferencia borrador Protocolo Controlador borroso
- 2. EJEMPLO DE CONTROL DIFUSO Caso hipotético de conducción Coche controlado Coche precedente Velocidad X2 (Km/h) Distancia entre coches X1 (m) EJEMPLO DE CONTROL DIFUSO Mecanismo de control Condiciones de Cantidad de entrada control Distancia entre coches (Intensidad X1 Control de de frenada) interferencia X2 Velocidad Reducción de difusa velocidad
- 3. USO DE TÉCNICAS FUZZY EN CONTROL DE PROCESOS e w CONTROLADOR - FUZZY y e’ 3 1: e grande ⇒ u grande • •2 2: e’ grande ⇒ u pequeña •1 3: e’ positiva ⇒ u grande SI (el error es grande); Y (su derivada pequeña y positiva) ENTONCES (el control será grande y positivo) SI (el error es nulo); Y (su derivada pequeña y negativa) ENTONCES (el control será pequeño y positivo) FORMA DE LAS FUNCONES DE PERTENENCIA NL NM NS ZR PS PM PL 1 Etiqueta Grado 0 (-) max (+) max Etiquetas: PL: Positivo grande PM: Positivo medio ZR: Próximo a cero NS: Negativo pequeño NM:Negativo medio NL: Negativo grande
- 4. GRADOS DE PERTENECIA A UN CONJUNTO Conventional sets theory Menbership degree “Tall” set 100 % Peter belongs to the “tall” set with a membership degree equal to 100% 0 LÓGICA BOOLEANA / FUZZY “Tall” fuzzy set 100 % Peter belongs to the µ “tall” fuzzy set with a membership degree equal to µ ( 0 % ≤ µ ≤ 100 % ) 0
- 5. FUZZY DIVISIÓN EN CLASES Menbership degree “Small” “Medium” “Large” 100 % µ µ MOTIVOS DE USO DE TÉCNICAS FUZZY EN CONTROL * PID SENCILLO, BUEN RESULTADO CUANDO PUEDE APLICARSE * COMPORTAMIENTOS NO LINEALES, VARIACIONES EN PROCESO O ENTORNO ⇒ CONTROL ADAPTATIVO * EN AMBOS CASOS SE DEBE DISPONER DE: - MODELO MATEMÁTICO DEL SISTEMA - CAPACIDAD DE REALIZAR CÁLCULOS COMPLETOS * EN EL COMPORTAMIENTO HUMANO, AL REALIZAR UNA TAREA DE CONTROL (CONDUCIR UN COCHE) NO SON NECESARIOS * CONTROL BASADO EN REGLAS, EN MODELO DE COMPORTAMIENTO * COMPARACIÓN PID / FUZZY CASO SERVOMOTOR 1 2 3 Time
- 6. * SUSTITUIR LAS REGLAS DE PRODUCCIÓN LINGÜÍSTICAS POR CÓDIGOS PARA OBTENER MÁS SIMPLES A pesar de que las reglas de producción se pueden expresar en frases lingüísticas, se utilizan códigos para simplificar la entrada a los controladores difusos reales. (Distancia entres dos coches : X1; velocidad: X2 ) (Intensidad de frenada: Y) (Etiquetas o niveles – pequeño, medio, grandes: S, M, L Sustituyamos estos códigos en las expresiones anteriores.